Project leader: Professor Ákos Nagy
Project manager: Matthew Beckett
Team members: Anuk Dayaprema and Haoyang Yu
This project has produced the following published paper:
Benoit Charbonneau, Anuk Dayaprema, C.J. Lang, Ákos Nagy, Haoyang Yu, Construction of Nahm data and BPS monopoles with continuous symmetries, J. Math. Phys. 63, 013507 (2022).
Project summary:
The Nahm transform provides a bijective correspondence between solutions of Nahm’s equations, a nonlinear system of ordinary differential equations, and solutions of the Bogomol'nyi-Prasad-Sommerfeld (BPS) monopole equation (which are called “monopoles”), a complicated partial differential equation in three variables. As such, there is physical motivation (from the fields of gauge theory and particle physics) for studying Nahm's equations. There is also pure mathematical interest in Nahm's equations, as the moduli space of the equations provides instances of hyperkähler manifolds.
As the nonlinearity of Nahm's equations largely precludes a general analytic solution, we restricted our study to solutions that take value in the Lie algebra $\mathfrak{su}(n)$, and we analyzed solutions utilizing symmetries of the equations, which come in the form of $SO(3)$ and $SU(n)$ group actions. Two cases were investigated: axially symmetric solutions, which are solutions that when acted upon by a one-parameter subgroup of $SO(3)$ can be recovered by a continuous $SU(n)$ action, and spherically symmetric solutions. We considered these cases due to their possible physical relevance.
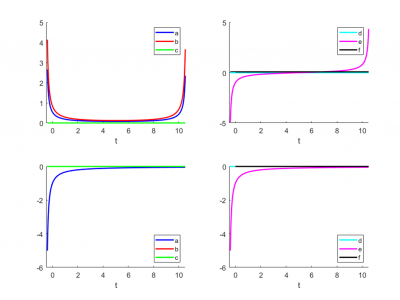
Under the assumption of axial symmetry, we further separated this case into weak axial symmetry and true axial symmetry. In each of these two subcases, we looked at three specific cases in $\mathfrak{su}(3)$, which when combined, can represent the vast majority of axially symmetric solutions, up to gauge. For the simplest case, we solved the Nahm equations analytically; however, for the other two cases, we had to resort to numerical approximations to investigate solutions and the moduli space.
In the spherically symmetric case, we formulated an ansatz that such solutions lie in a certain three-dimensional invariant subspace of $\mathfrak{su}(n)$; explicitly, given a triple $(Y_i)$ that satisfies the commutation relations $[Y_i,Y_j]=\epsilon_{ijk}Y_k$, we postulated that spherically symmetric solutions are invariant under the adjoint action of $\text{span}(Y_i)$. We showed that when $(Y_i)$ are irreducible, there exist only simple solutions that are of the form described in early work by geometer Andrew Dancer. For the reducible case, we formulated a structure theorem that prescribes the form of spherically symmetric solutions.